Here, we show several examples (videos) illustrating the DFMM
Figure 1: Time field for a balk obstacle. Left: Exact solution. Right: The FMM fails while the DFMM works fine.
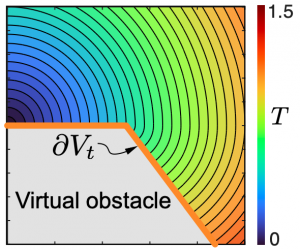
Figure 6A: Two small obstacles (blue circles) create a big virtual obstacle (i.e., a region not accessible for the agent, white area). The color corresponds to the time necessary to reach a certain location.
Figure 6B: An agent searches for a path in a labyrinth with moving obstacles. Significantly different trajectories can lead to spatially close locations.
Figure 6C: Movement in a domain with periodic boundary conditions.
Figure 7: Simulation of a 3D environment.
Figure 8: Simulation of movements in a non-homogeneous environment.